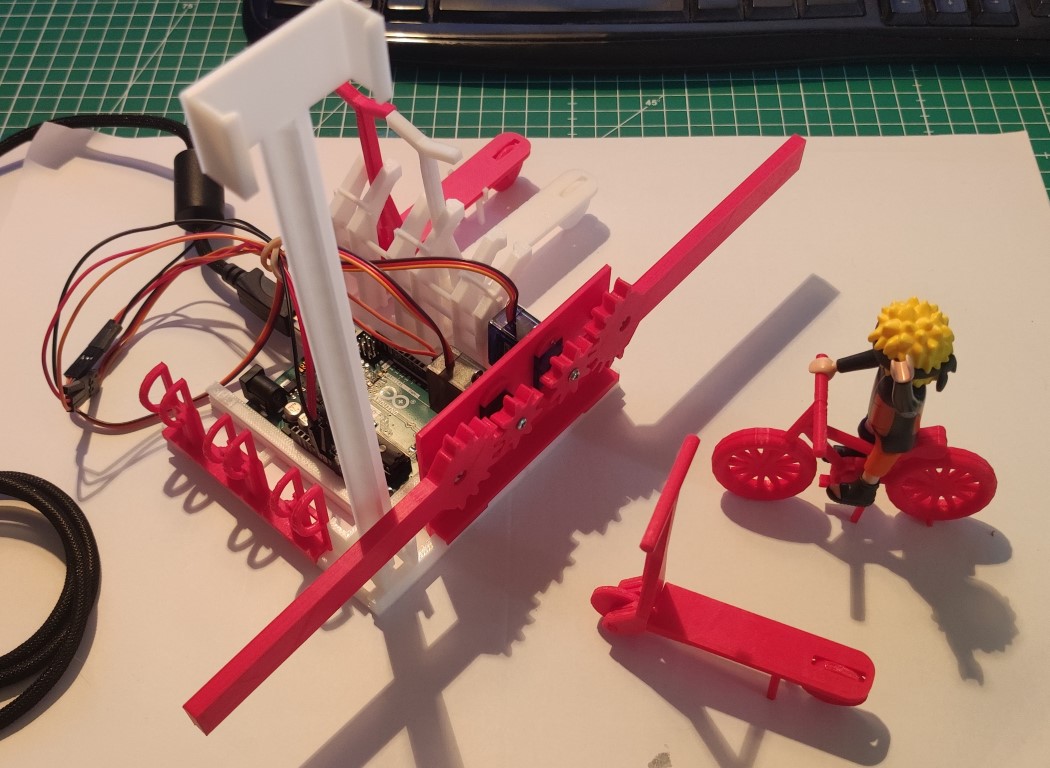
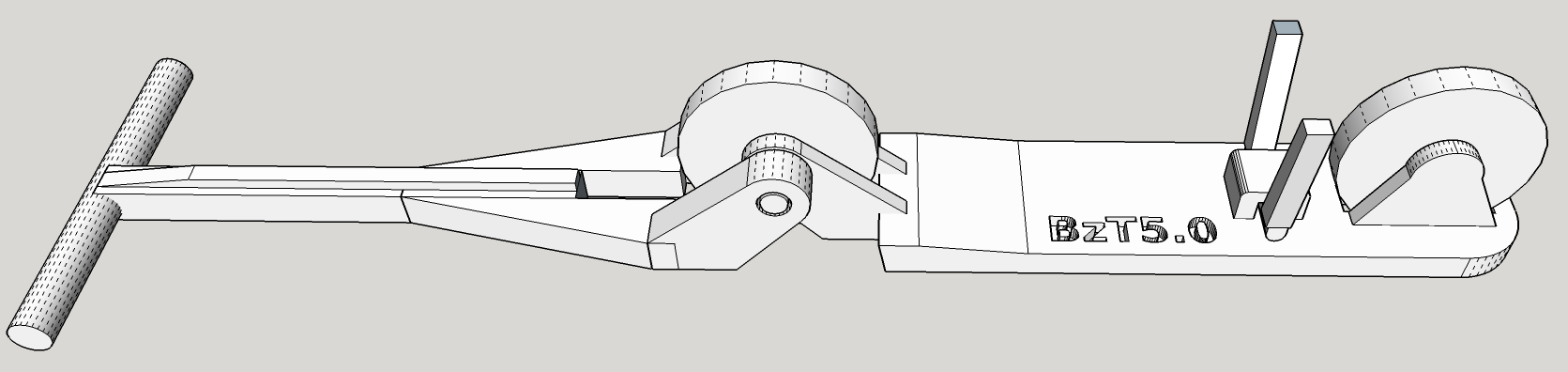
Fonctionnement normal de la barrière intelligente : la barrière de gauche se lève quand un vélo se présente, et se referme ensuite, la barrière de droite se lève quand une trottinette se présente, et se referme ensuite. Quand un autre objet est présenté, les 2 barrières doivent rester fermées.
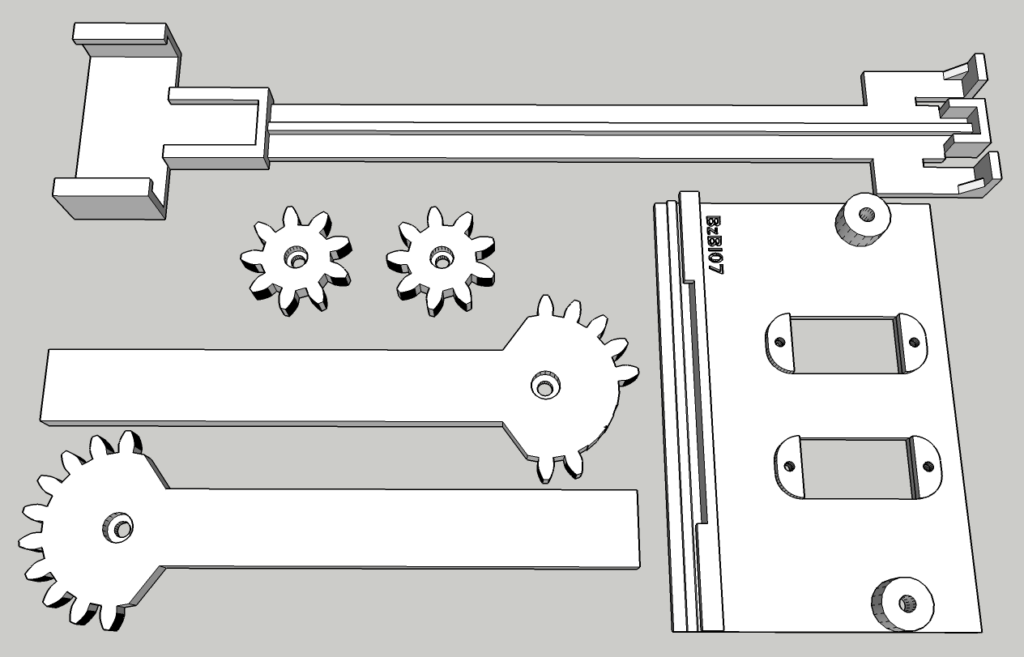
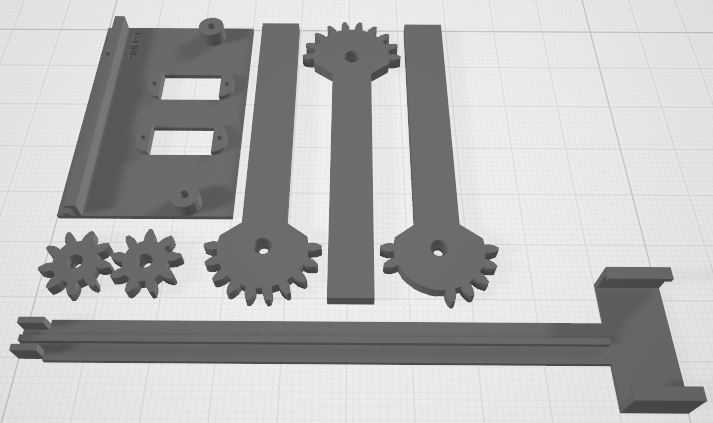
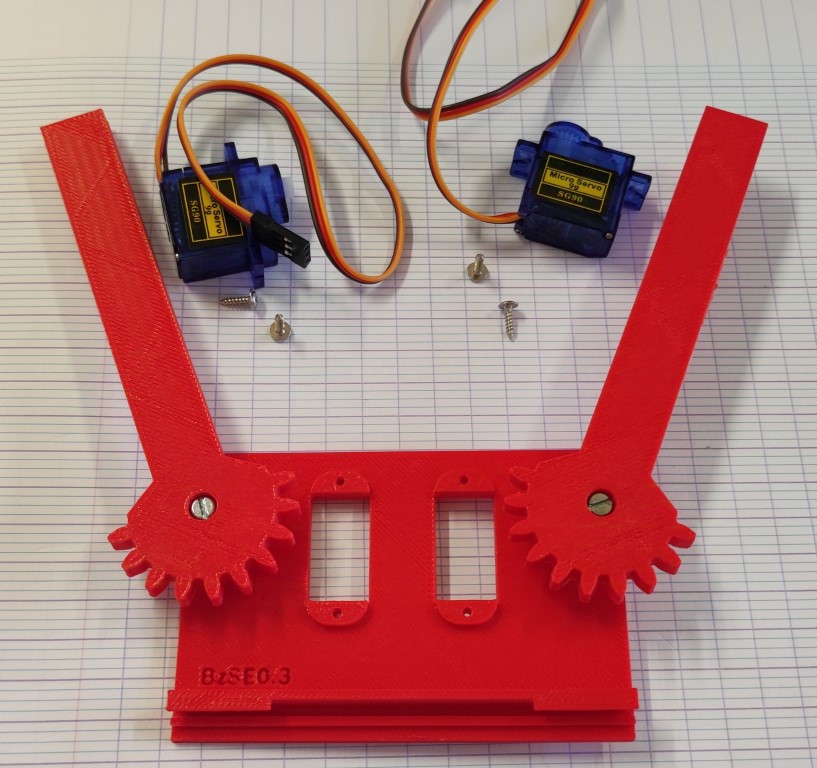
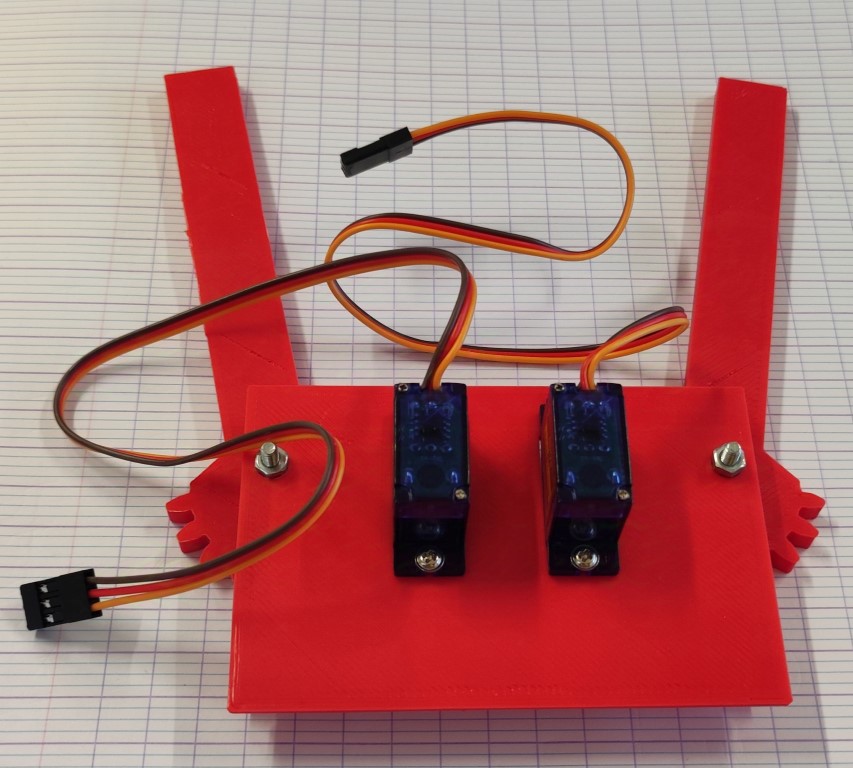
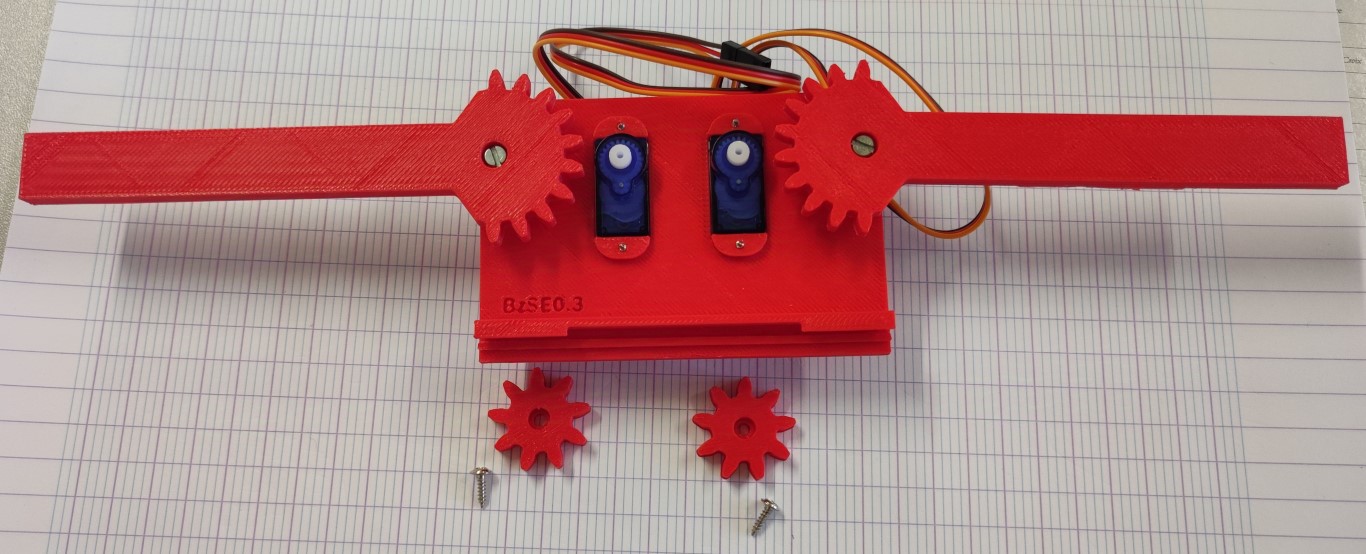
Composants de cette barrière
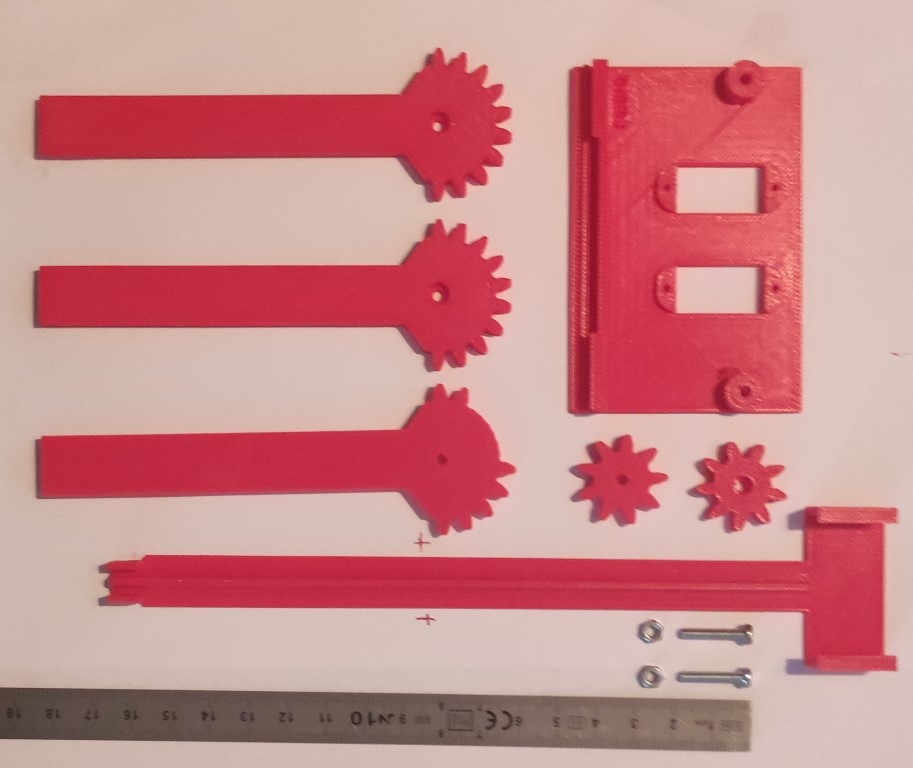
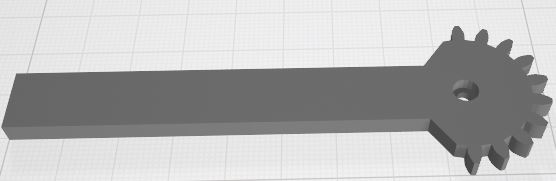
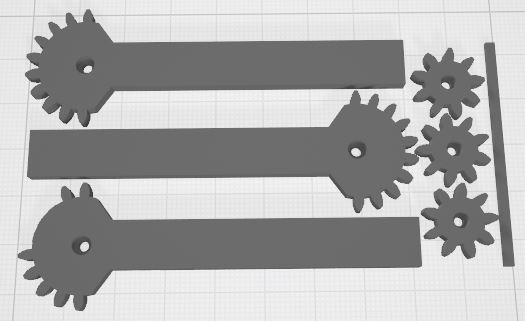
Il y a 2 barrières avec toutes les dents nécessaires, et une 3ème barrière avec des dents manquantes: pour l’étape de réparation du système par les élèves.
C’est une petite évolution de la séquence proposée par Rennes: je fais réaliser par les élèves le fonctionnement normal dans un premier temps avec le kit monté avec les 2 barrières complètes, avec fourniture du modèle d’IA qui va bien (mais pas trop pour ne pas détecter tous les objets correctement), et la partie du programme qui manque pour entrainer une des 2 barrières. Aux élèves de rajouter la partie du code qui va bien, et de comprendre qu’il va falloir améliorer le modèle d’IA (en ajoutant des images) pour que le système fonctionne mieux.
Dans un second temps, je remplace une des 2 barrières par la barrière incomplète et leur demande d’expérimenter à nouveau: il va leur falloir comprendre le problème, et proposer des solutions de réparation … après avoir vu l’indice de réparabilité 😉
Pour tous les STL sur ce site, licence CC BY-NC 4.0 ATTRIBUTION – PAS D’UTILISATION COMMERCIALE 4.0 INTERNATIONAL
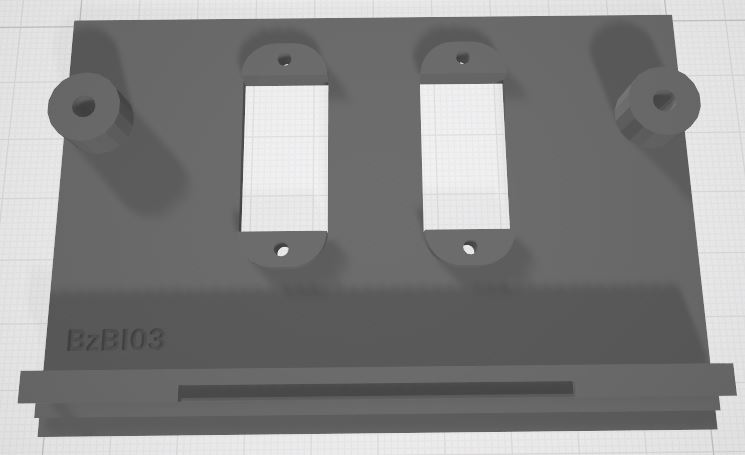
Fichier STL complet avec 2 barrières (1 entière et une incomplète), 2 petits engrenages, le support des servomoteurs et le nouveau support de la caméra (qui permet une rallonge).
Temps d’impression : 1h20, sans supports
Longueur de filament utilisée: 12,86m
Coût d’impression estimé pour le kit : 70cts (coût d’une bobine hyper PLA à 30€ approximativement pour 600m).
Fichier STL complet avec 3 barrières (2 entières et une incomplète), 2 petits engrenages, le support des servomoteurs et de la caméra. Nécessite 1h50 d’impression, sans supports.
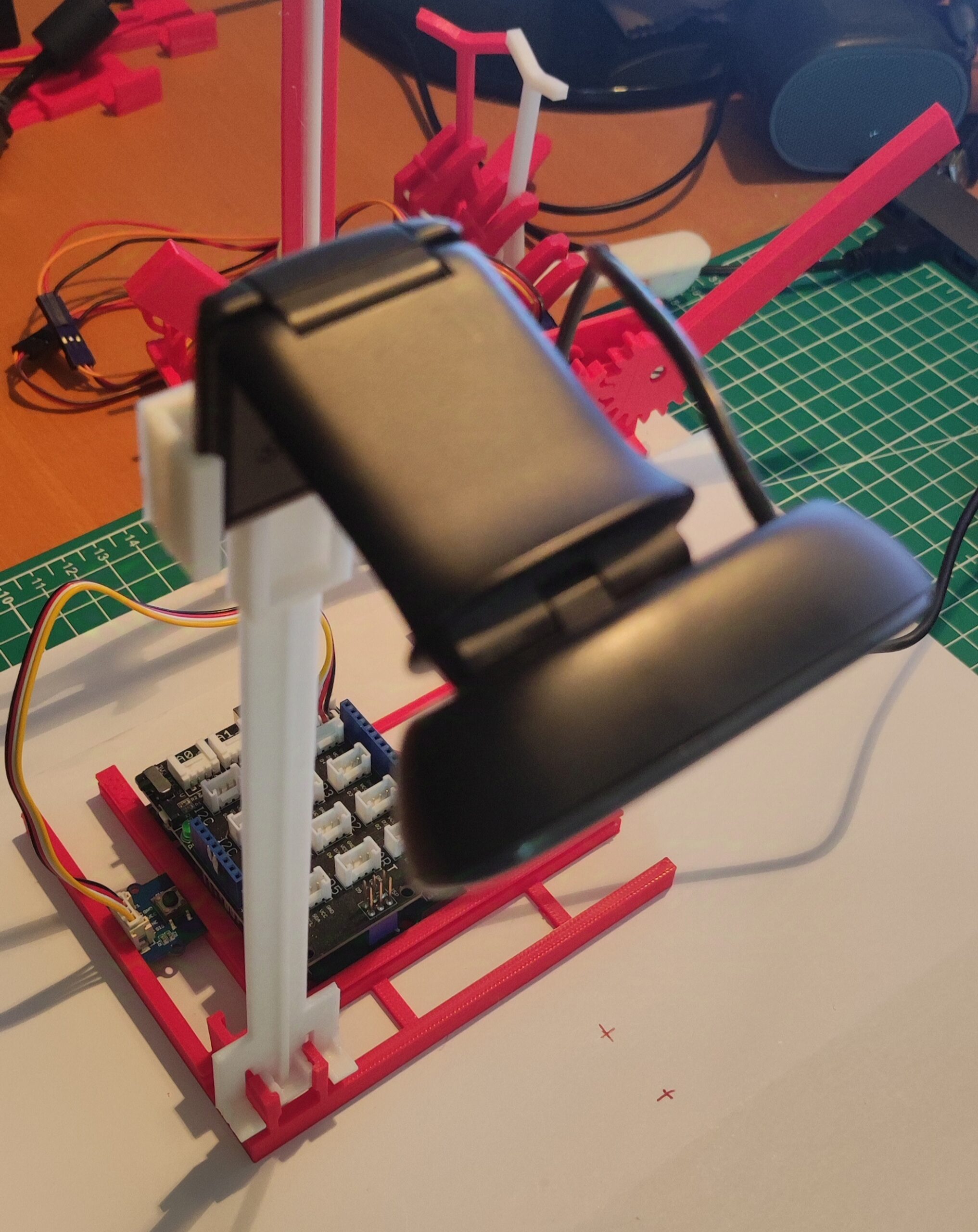
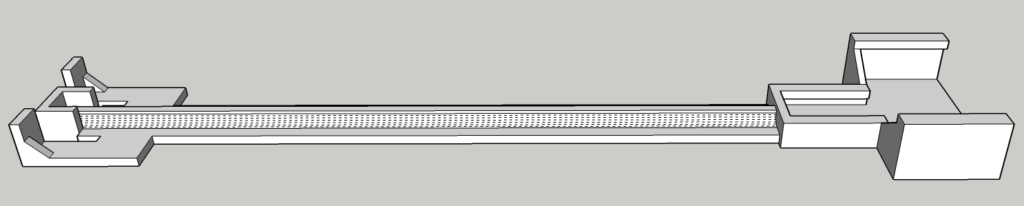
Fichier STL du support caméra (v0.7). Cette nouvelle version permet de doubler la longueur du support de la caméra, et peut se fixer sur une plaque indépendamment de la platine qui contient le logement pour la plugger.
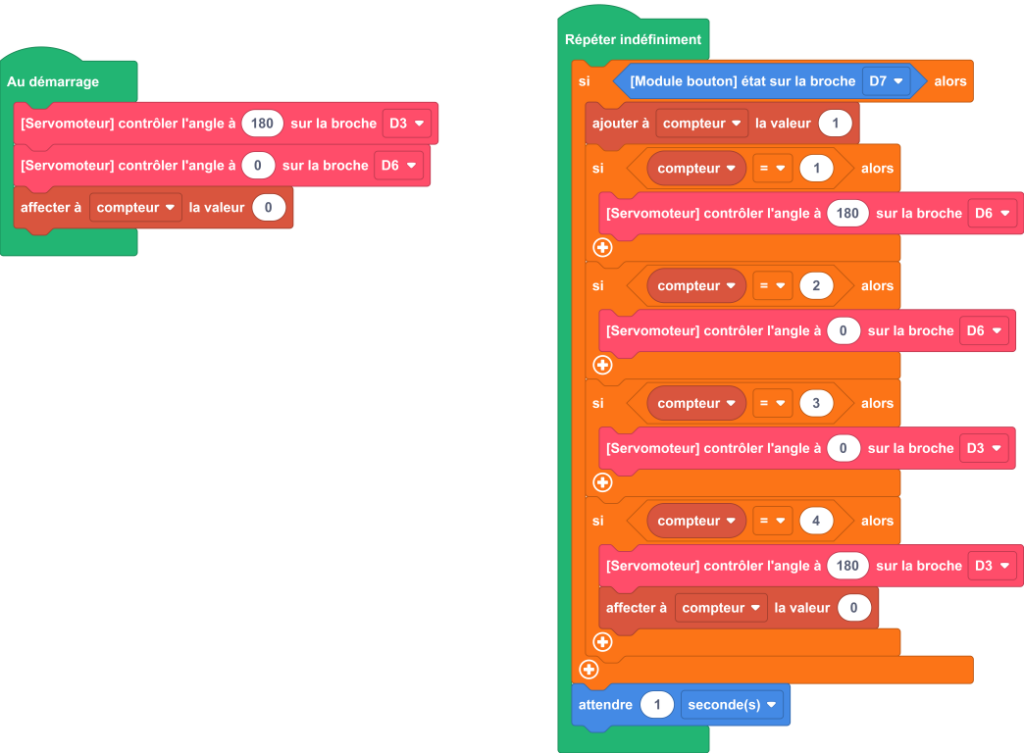
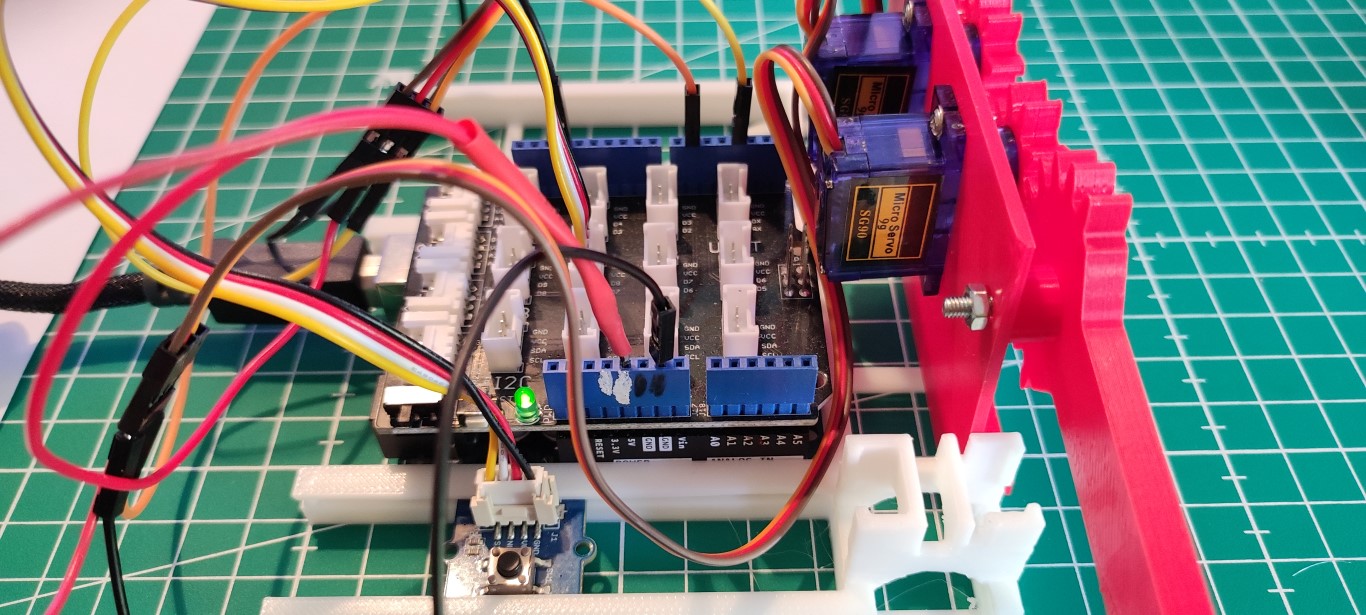
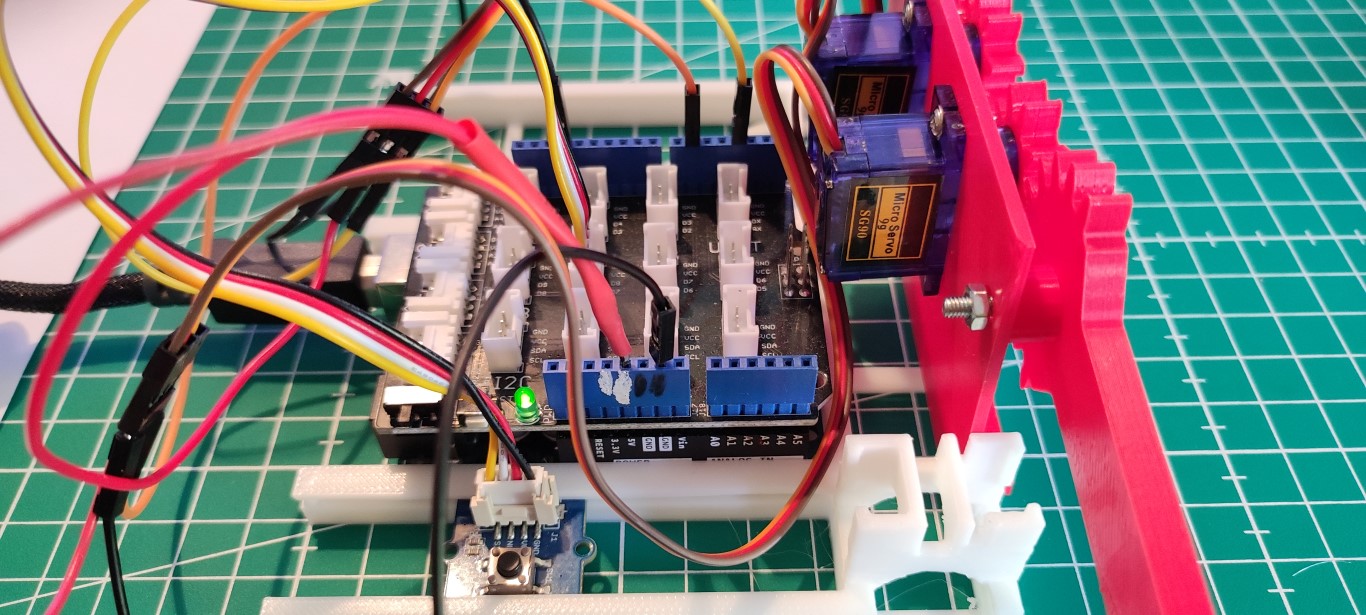
Programme de test des barrières avec 2 boutons poussoirs
Le programme suivant permet de tester les 2 barrières en ouverture et de fermeture avec deux boutons poussoirs.
Le programme partagé sur Vittascience avec le nom « Parking-intelligent-2-barrieres-test-des-barrieres-avec-2-BP (ARDUINO)« est accessible par cette adresse:
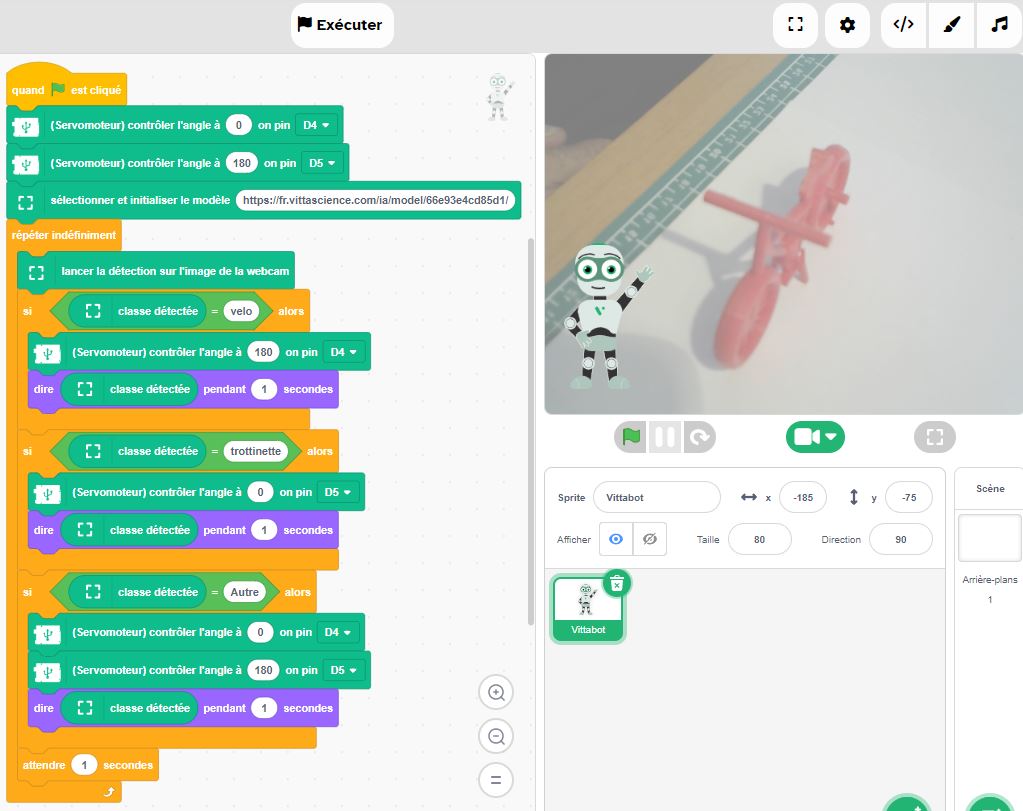
Le programme suivant permet le fonctionnement attendu du parking intelligent:
Initialiser les barrières à l'horizontal
Lancer l'utilisation du modèle IA
Répéter indéfiniment
Lancer la détection par la caméra
Si un Vélo se présente sous la caméra, alors
Lever la barrière gauche
Attendre 1 s
Fin du Si
Si une trottinette se présente sous la caméra, alors
Lever la barrière droite
Attendre 1 s
Fin du Si
Fin du Répéter
Le programme partagé sur Vittascience avec le nom « Parking-intelligent-2-barrieres-test-des-barrieres (ARDUINO)« est accessible par cette adresse:
Sur chaque appui du bouton poussoir, une action est effectuée sur un servomoteur : ouverture, puis fermeture du premier, puis ouverture et fermeture du second.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}