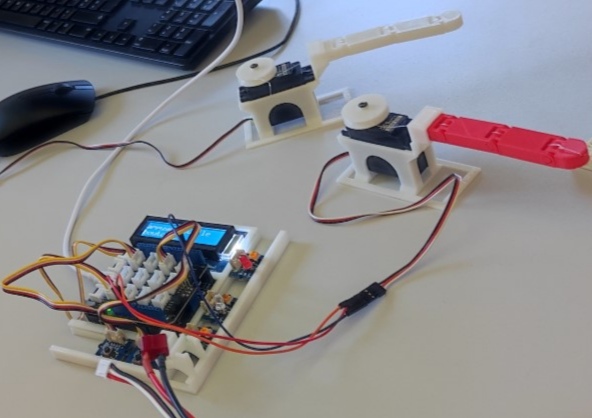
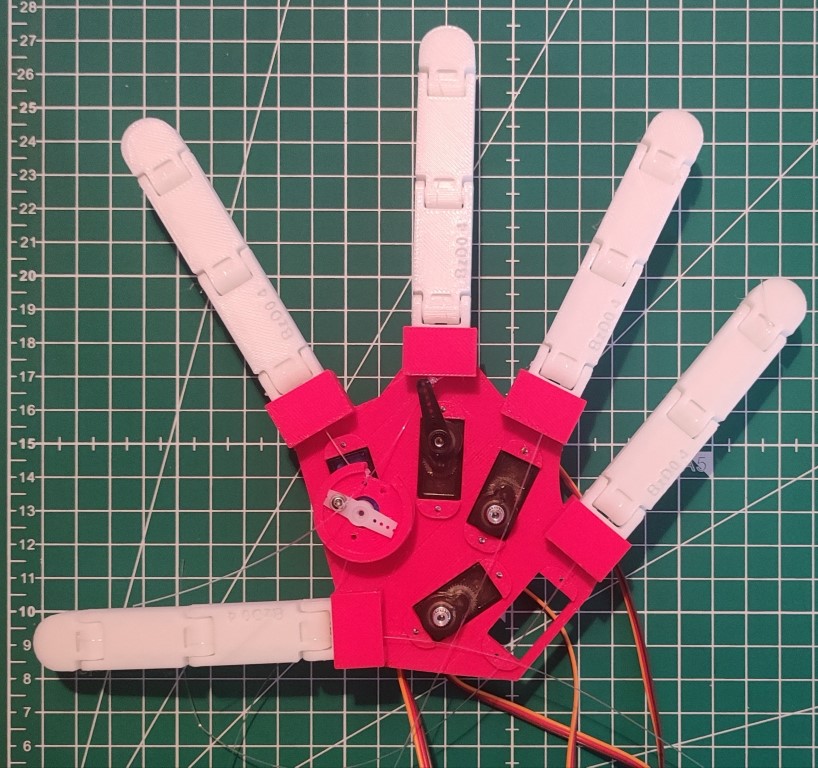
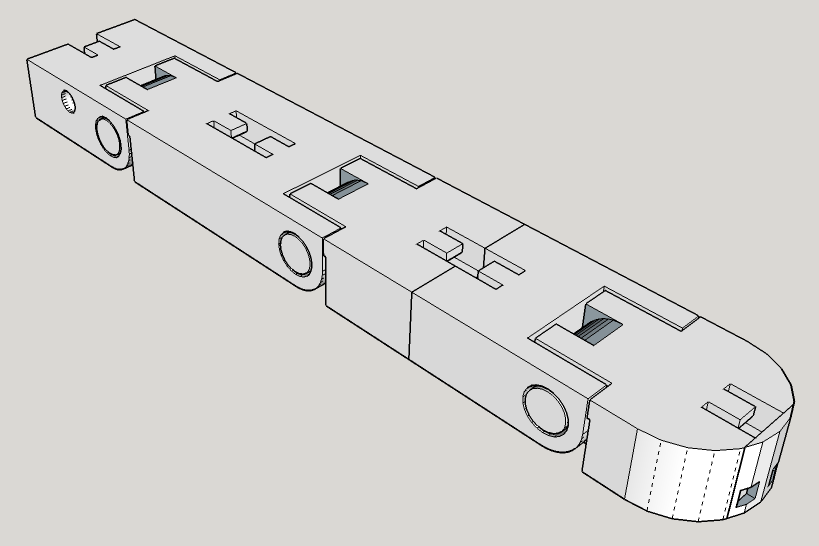
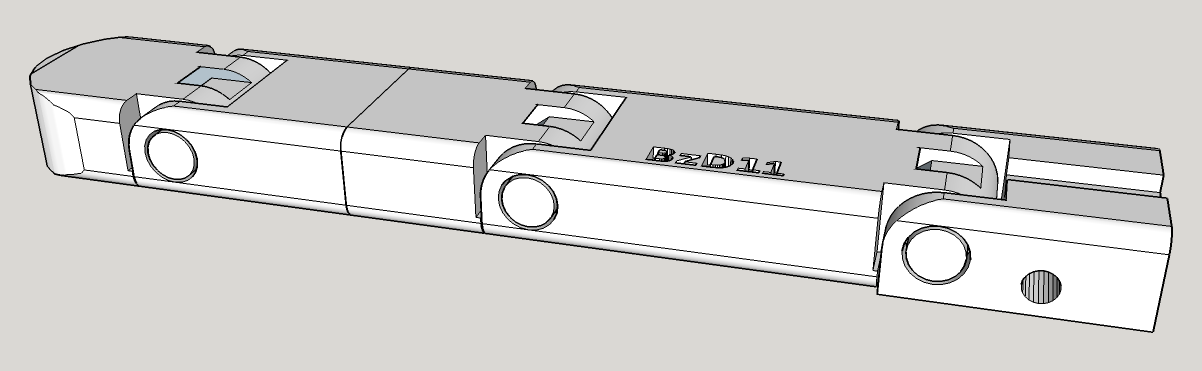
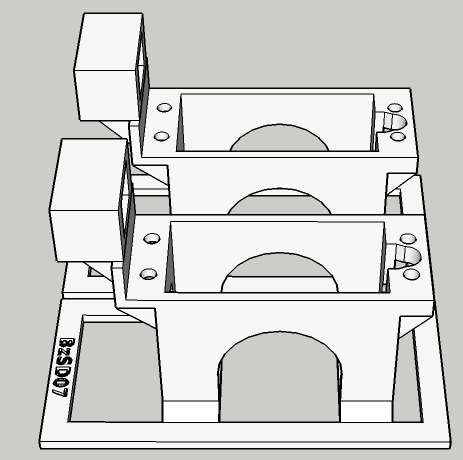
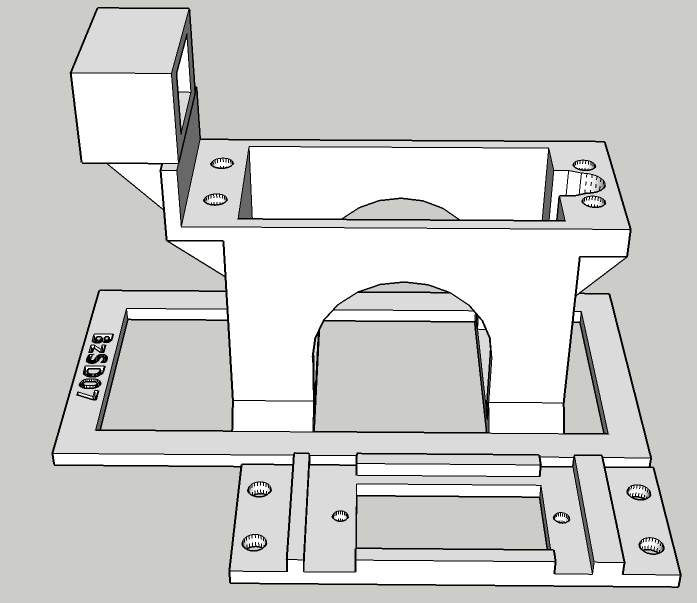
J’ai réalisé ce doigt articulé, toujours sans vis, pour être ajusté avec 4 autres doigts pour former une main robotique. De nombreuses activités peuvent être réalisées avec uniquement le doigt et son support qui s’ajuste sur la platine (Platine arduino/esp32 sans vis) disponible sur le site.