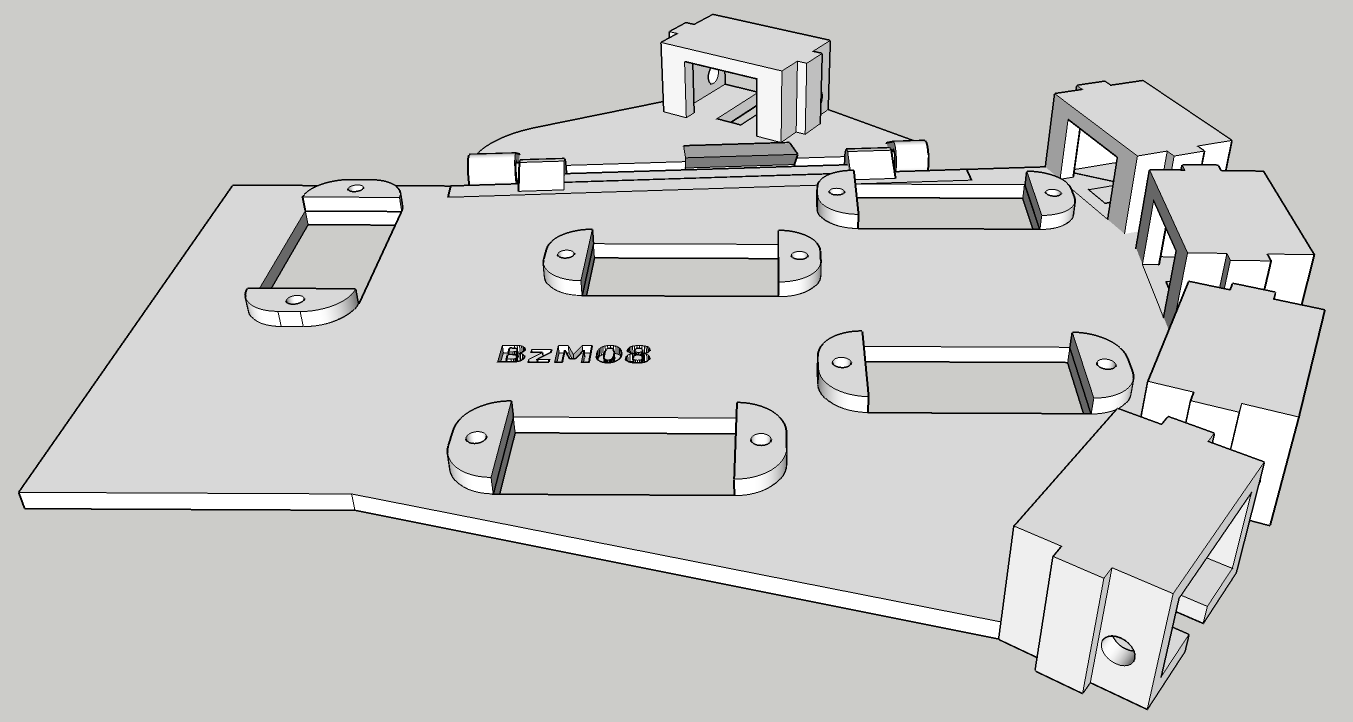
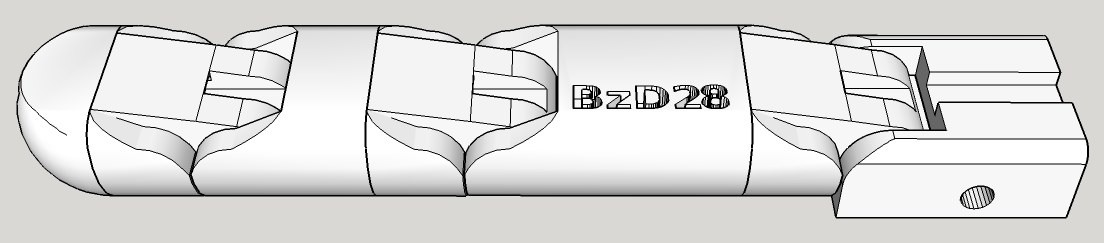
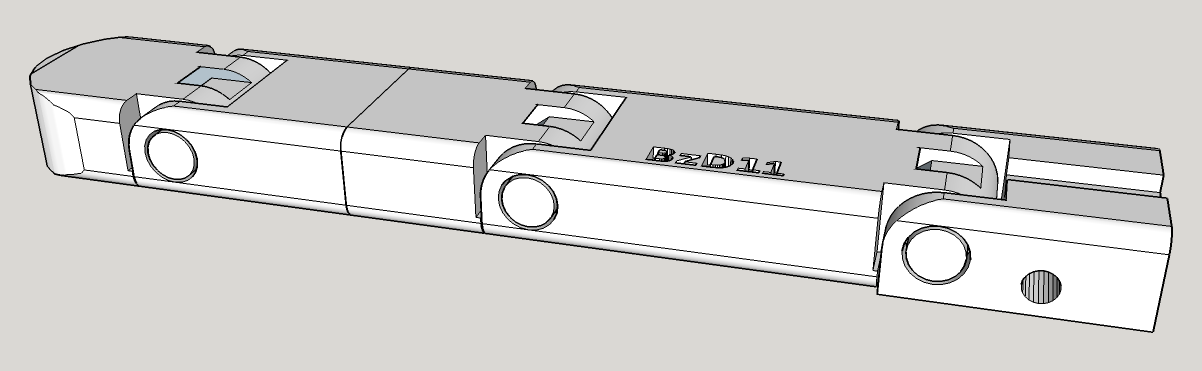
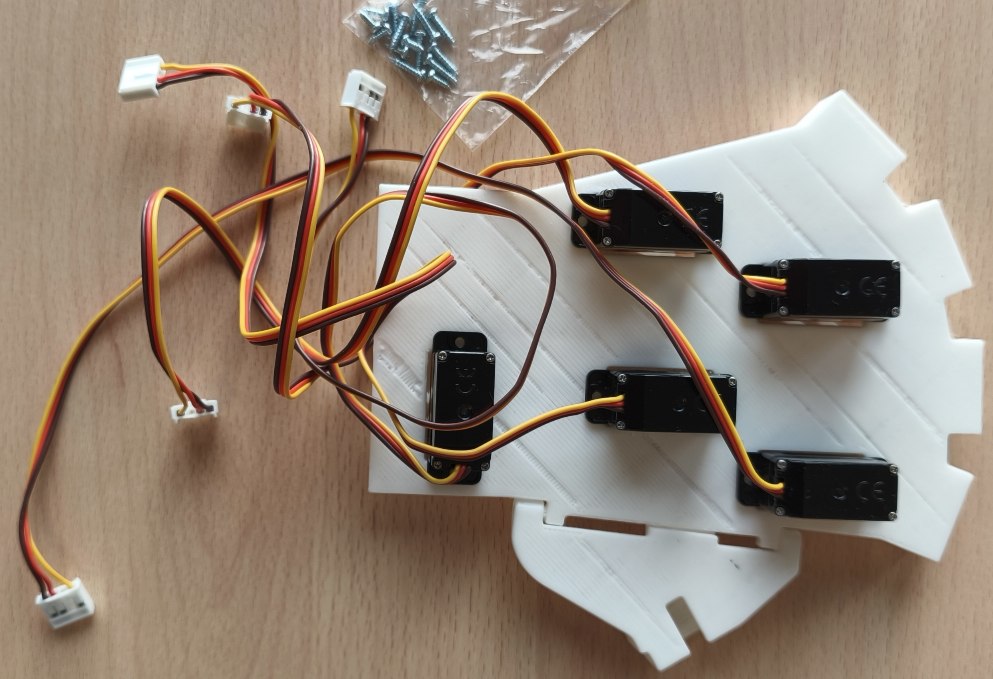
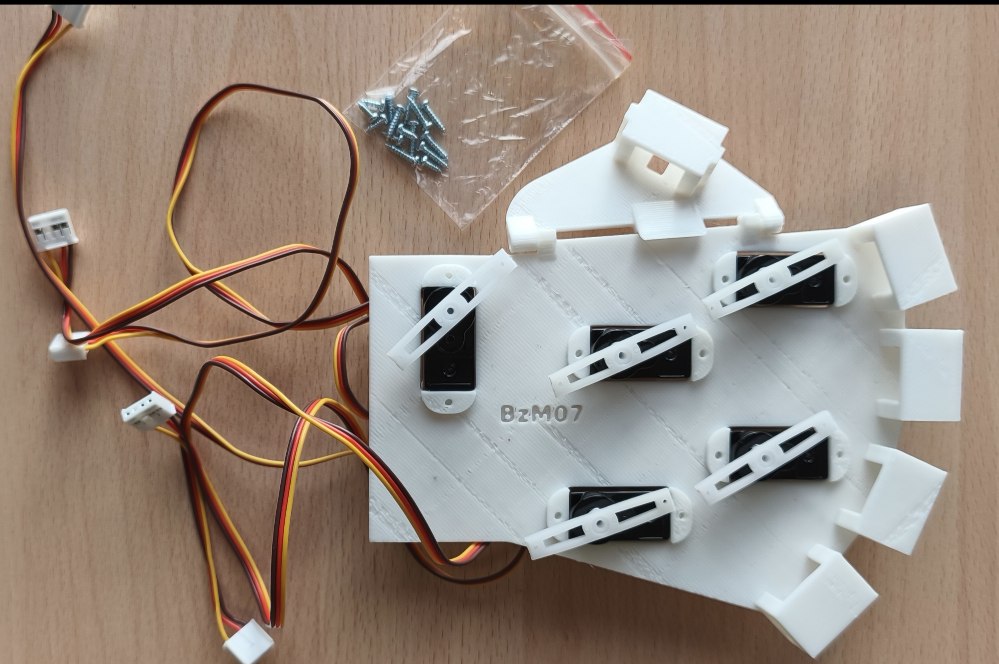
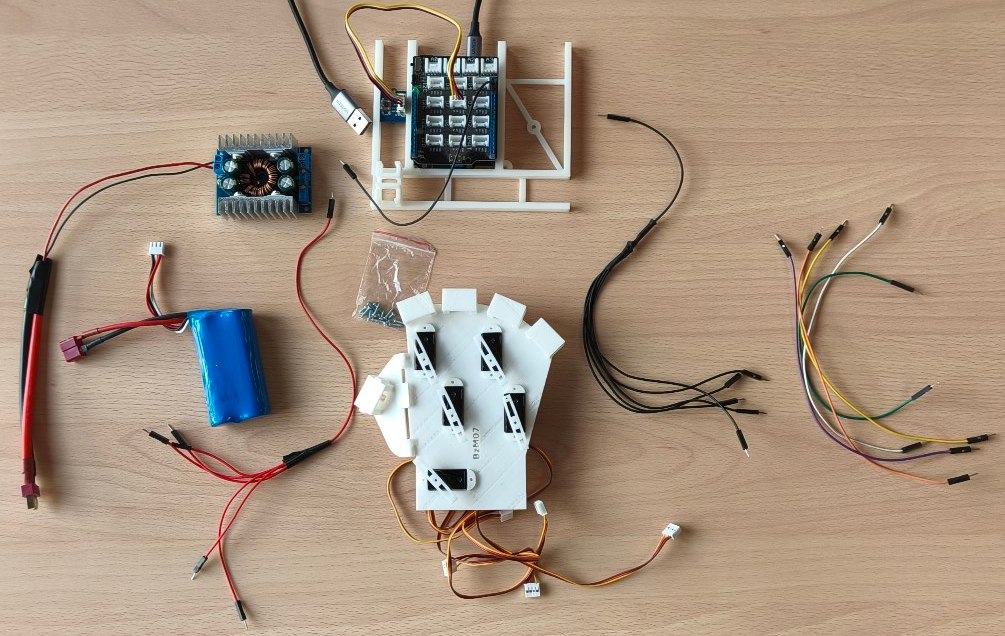
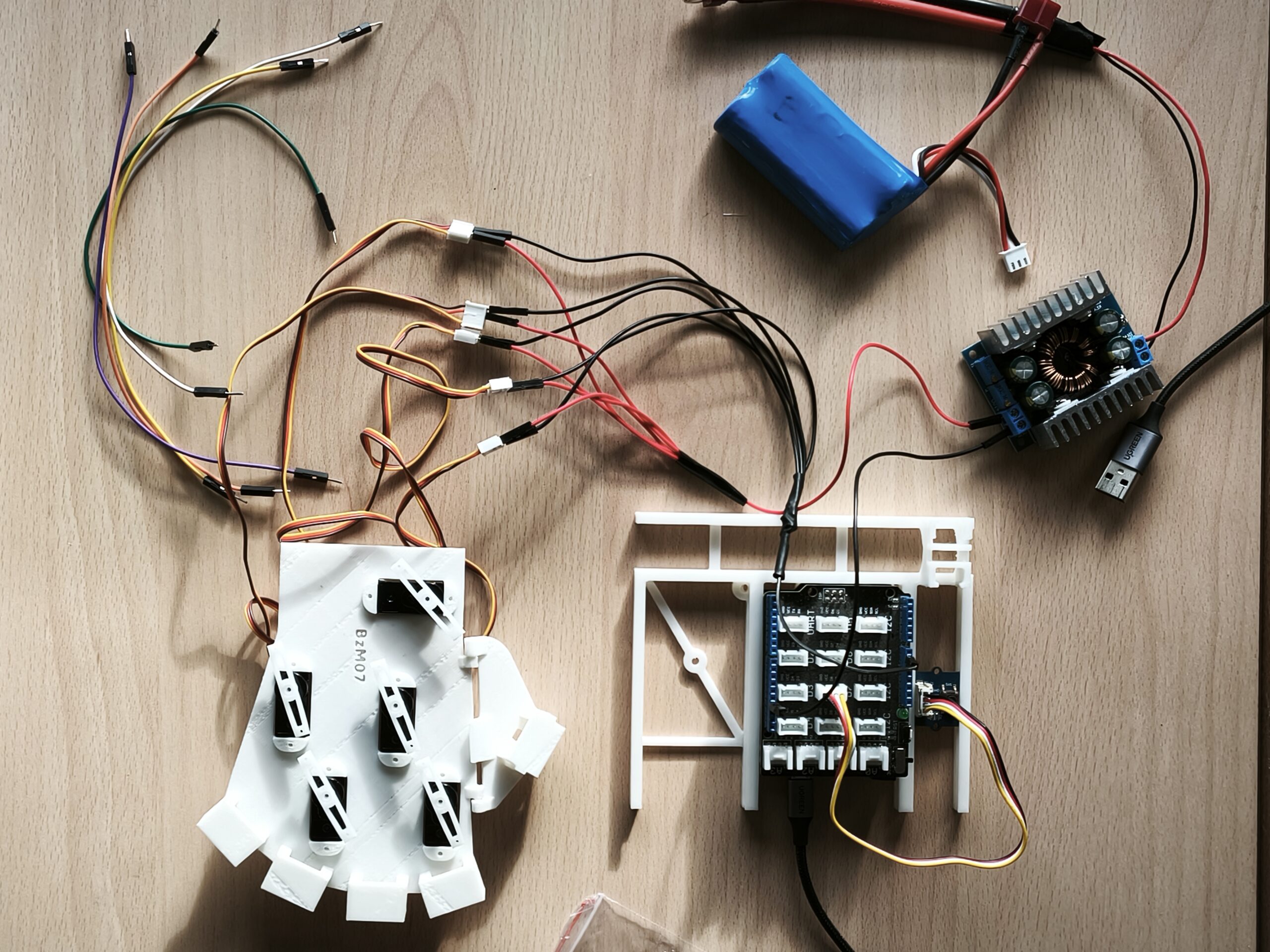
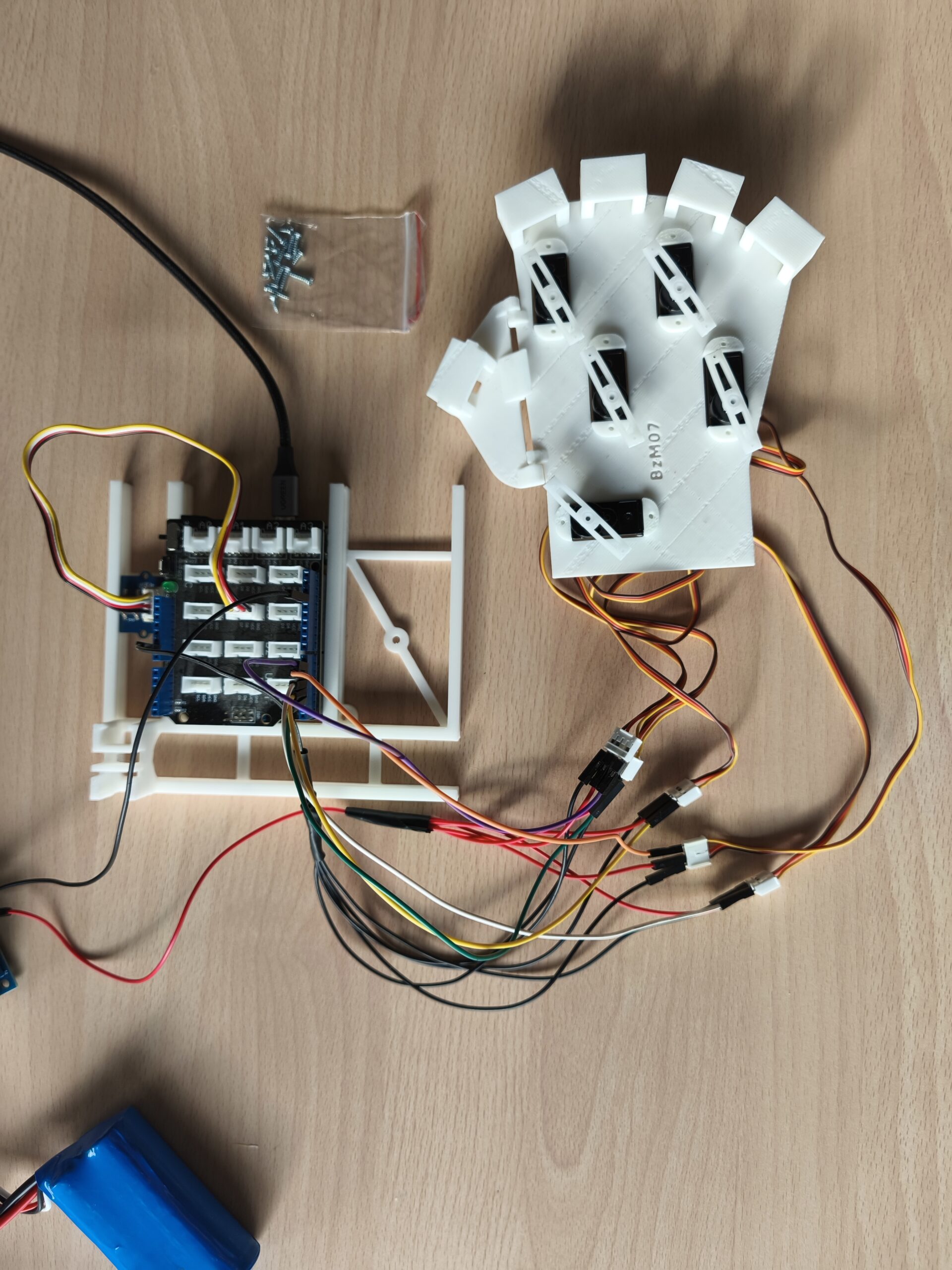
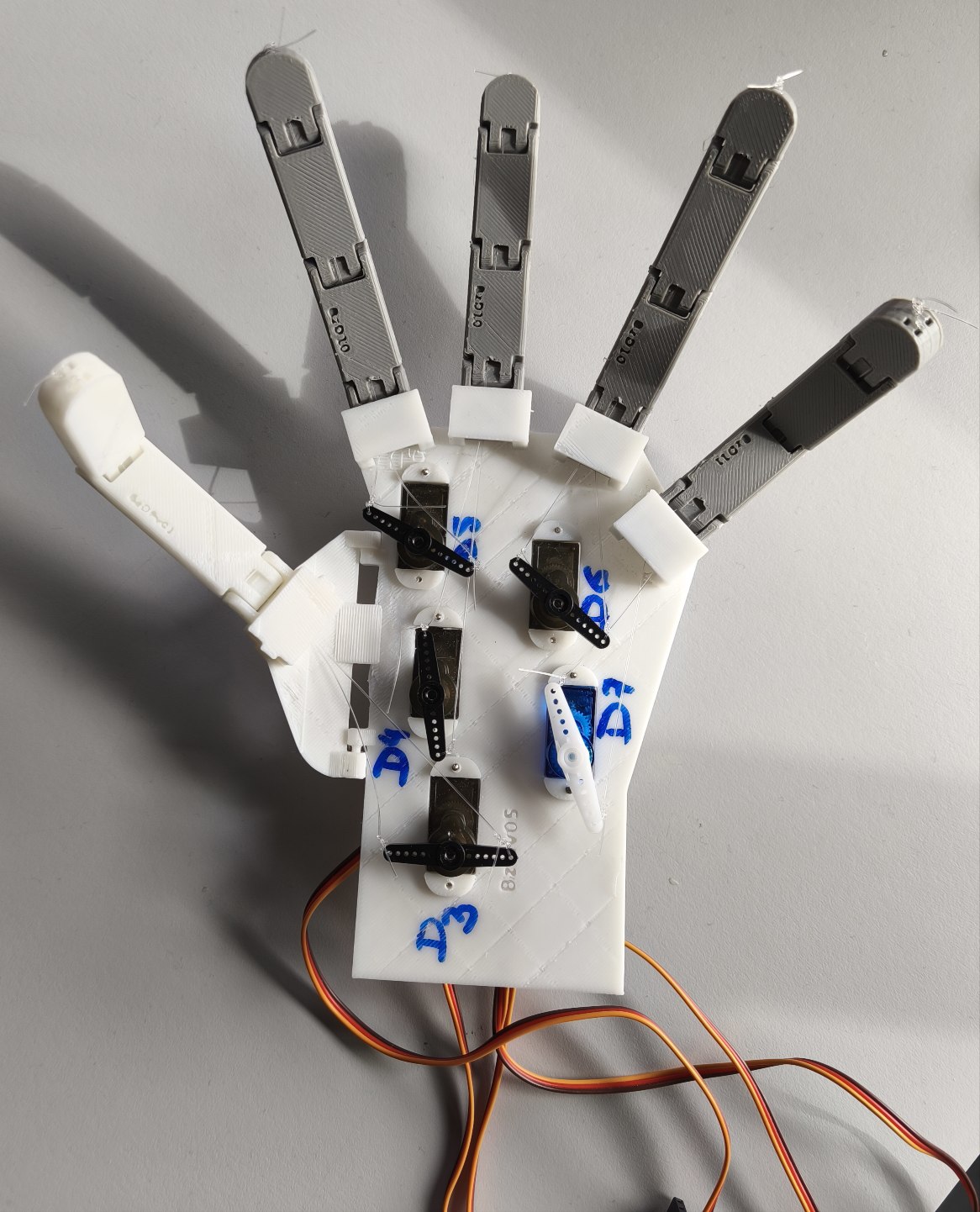
Démonstration du fonctionnement des doigts avec les mini-servomoteurs. Chaque doigt est relié à un servomoteur par deux fils, un pour le plier, et l’autre pour le déplier.
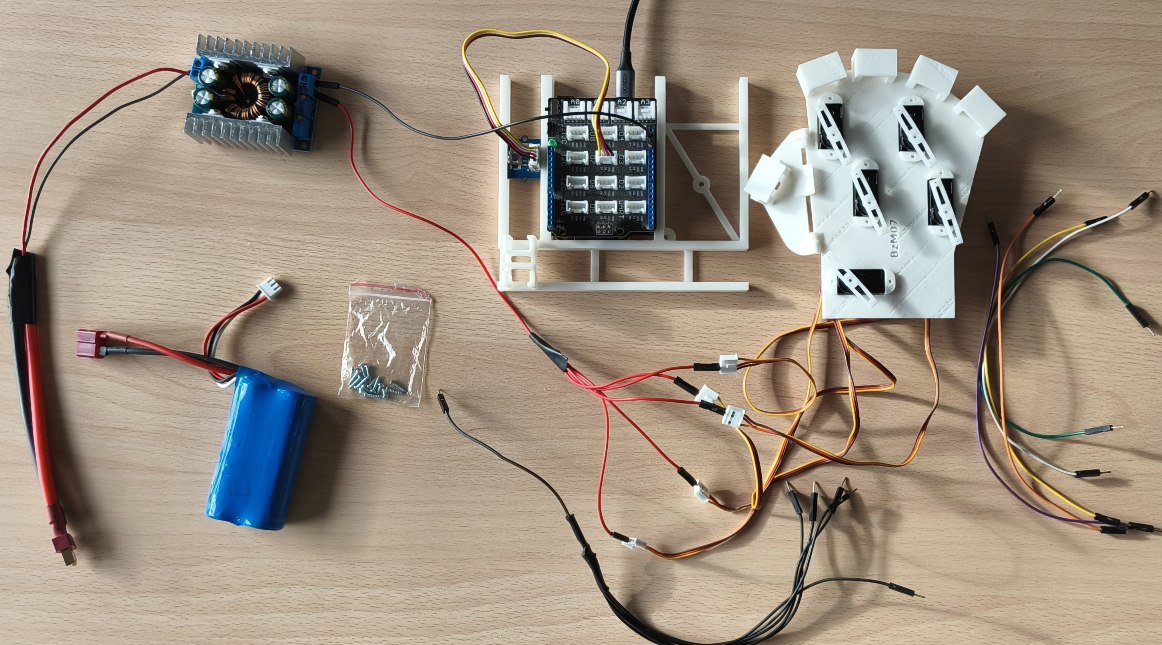
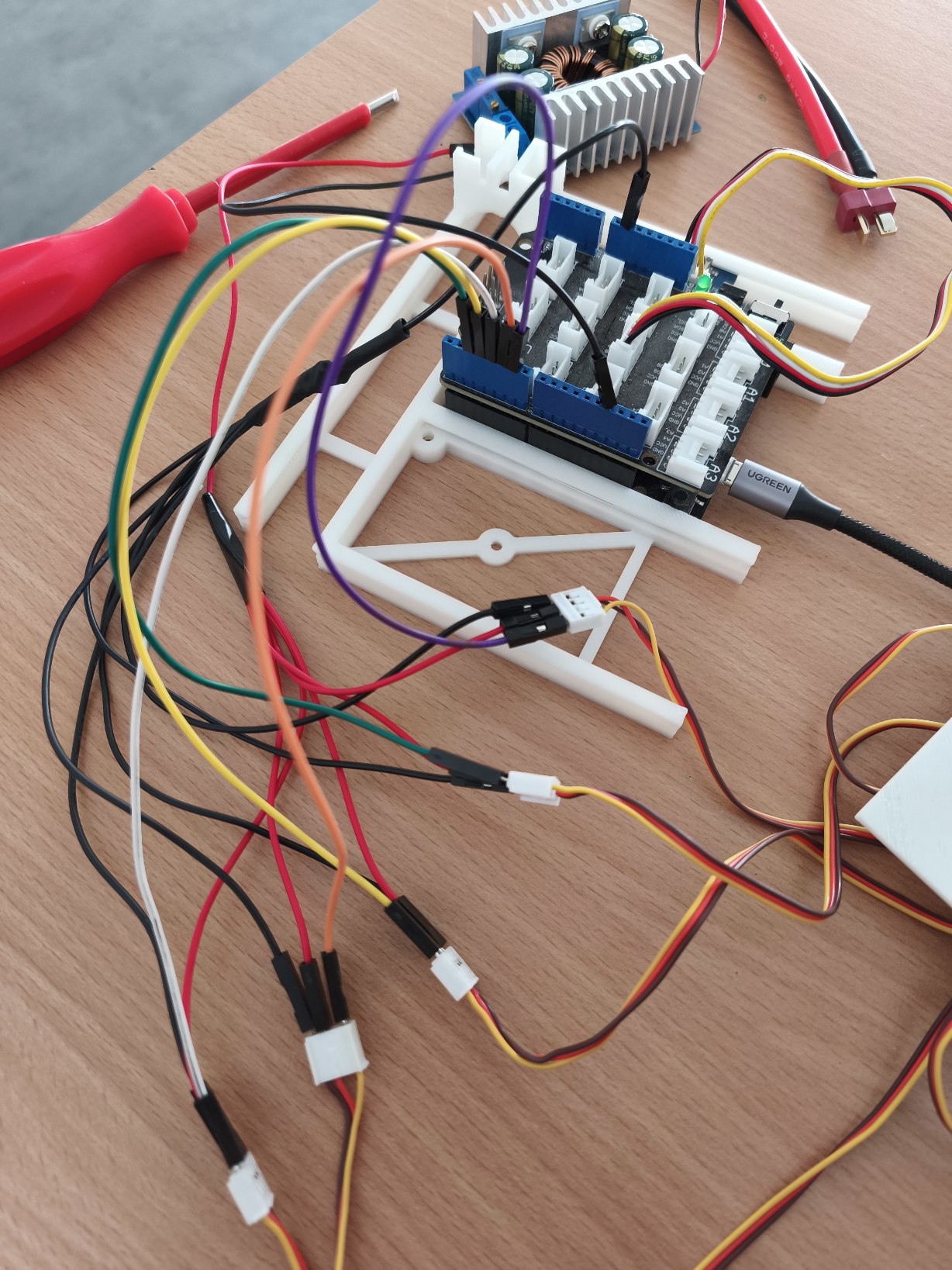
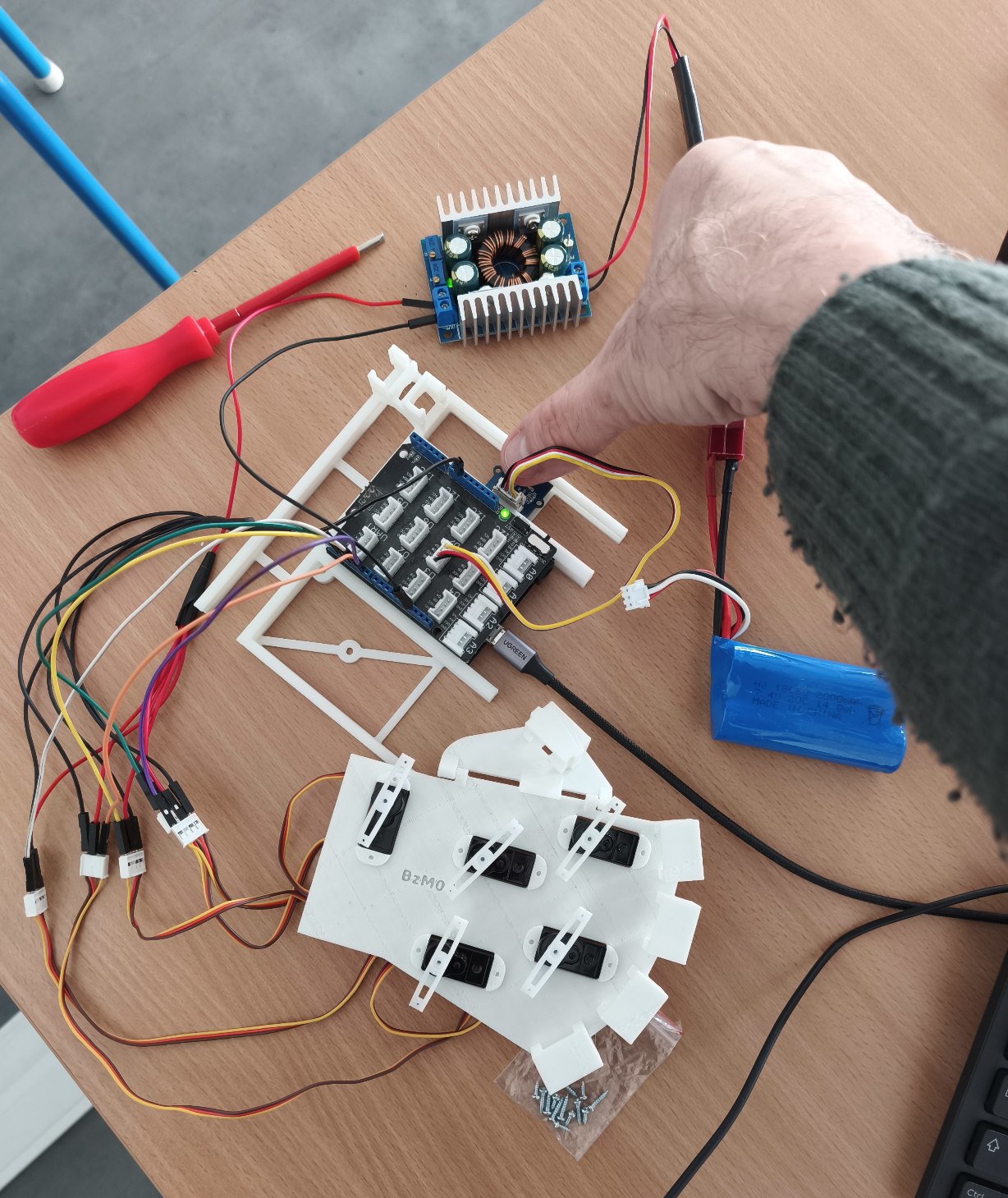
Réglage de l'alimentation avec le convertisseur DC-DC
Si le réglage du convertisseur DC-DC n’est pas correct, les servomoteurs tournent n’importe comment. Il faut alors ajuster avec un petit tournevis les potentiomètres du convertisseur, jusqu’à obtenir une rotation similaire des 5 servomoteurs.
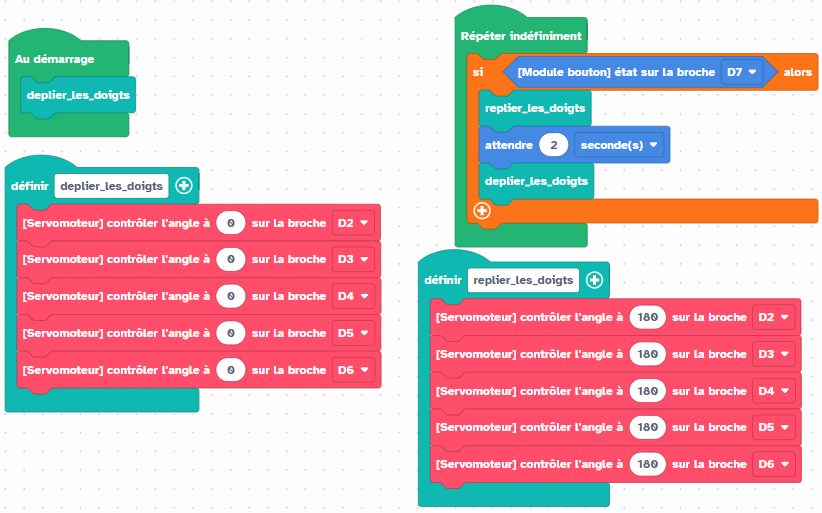
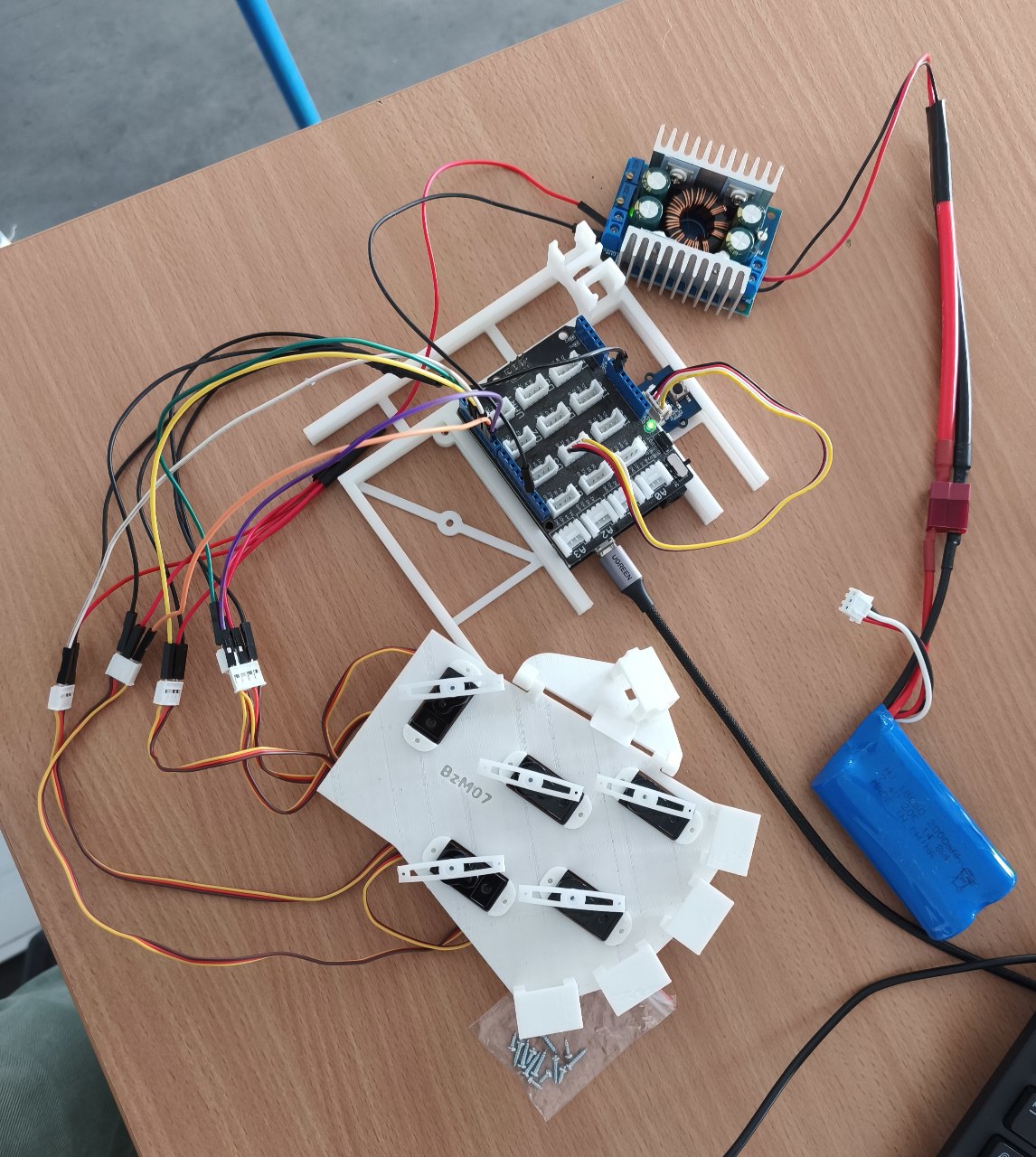
Programme de test des 5 doigts de la main
Ce programme très simple commande la fermeture et l’ouverture des 5 doigts sur appui sur un bouton poussoir.
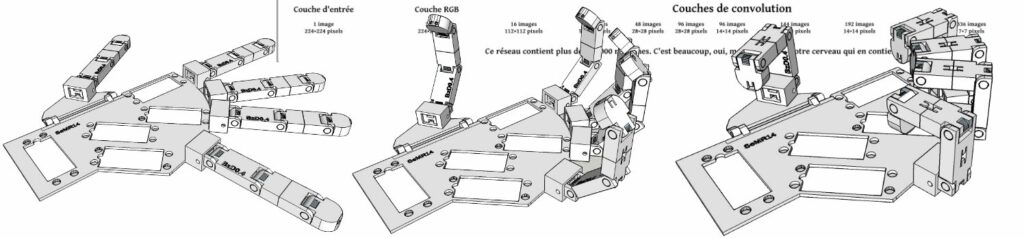
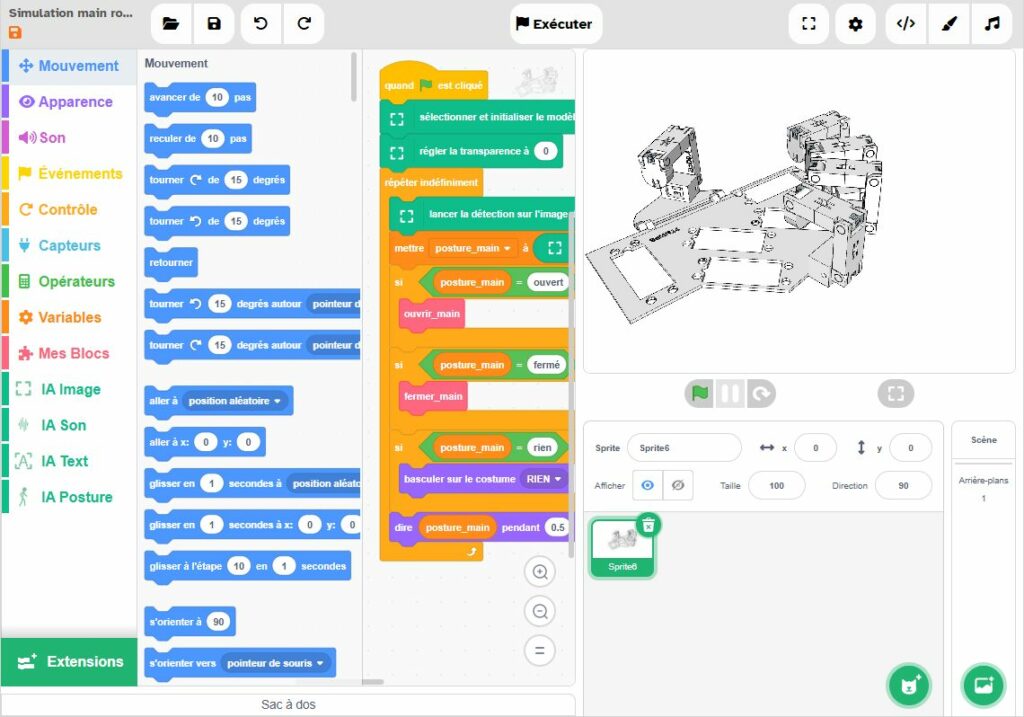
Simulation de la main robotique
Le programme de simulation suivant permet de tester le modèle IA de reconnaissance de la main ouverte ou fermée et d’afficher une petite animation de la main artificielle qui s’ouvre et se ferme suivant que vous mettez votre main sous la caméra ouverte ou fermée.
Ce programme, ainsi que le modèle d’IA, a été réalisé principalement par Tao S. de la classe de 5ème du collège Antonin Perbosc, à Lafrançaise (82).
Nous l’avons présenté le mercredi 9 avril 2025 au Lycée M-L Dissard, dite Françoise Tournefeuille (31) lors de la Journée académique de l’innovation.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}